publications
Publications in reversed chronological order.
2026
-
 Perceiving latent dynamics: Innate and coachable visual estimation of limb dampingTaliyah Huang, Meghan E Huber, Jeremy D Brown, and 1 more authorbioRxiv, 2026
Perceiving latent dynamics: Innate and coachable visual estimation of limb dampingTaliyah Huang, Meghan E Huber, Jeremy D Brown, and 1 more authorbioRxiv, 2026Humans are remarkably adept at extracting latent dynamic information from purely visual cues. Prior work shows that people can innately estimate differences in limb stiffness using solely their visual observation of movement, which suggests that components of mechanical impedance may be embedded within humans’ internal predictive models of movement. We tested whether humans can similarly perceive damping, a force-velocity relationship, and whether targeted coaching can enhance this visual ability. Specifically, 30 participants observed abstract two-link arm simulations with systematically varied elbow damping and rated their perceived level of damping for several trials. Participants completed two sessions separated by one of three brief coaching interventions: (1) no coaching, (2) coaching to attend to hand velocity, or (3) coaching to attend to elbow-angle velocity. Results reveal that (1) humans can innately perceive changes in arm damping using solely their visual observation of motion and (2) coaching further improved performance, with the elbow-angle coaching group showing a significantly greater increase in rating accuracy compared to the other two groups. This work extends our understanding of how action-perception coupling supports inference of mechanical impedance. Moreover, we demonstrated that perceptual strategies for estimating damping are malleable and can be systematically improved through coaching. We not only identified the visual cues observers relied on but also guided them toward more classifiable features, effectively strengthening their perceptual models of limb dynamics.
@article{huang2026perceiving, title = {Perceiving latent dynamics: Innate and coachable visual estimation of limb damping}, author = {Huang, Taliyah and Huber, Meghan E and Brown, Jeremy D and West, A Michael}, journal = {bioRxiv}, pages = {2026--03}, year = {2026}, publisher = {Cold Spring Harbor Laboratory}, doi = {10.64898/2026.03.02.708982}, }
2025
- VAF-CI: Quantifying low-dimensional global movement complexity during a novel lower limb motor learning taskMathieu Berthet, A Michael West Jr, Meret Branscheidt, and 1 more authorGait & Posture, 2025
@article{berthet2025vaf, title = {VAF-CI: Quantifying low-dimensional global movement complexity during a novel lower limb motor learning task}, author = {Berthet, Mathieu and West Jr, A Michael and Branscheidt, Meret and Awai, Chris Easthope}, journal = {Gait \& Posture}, volume = {121}, pages = {30--31}, year = {2025}, publisher = {Elsevier}, doi = {10.1016/j.gaitpost.2025.07.037}, } -
 Optimizing Cross-Modal Matching for Multimodal Motor RehabilitationAnway S Pimpalkar, A Michael West, Jing Xu, and 1 more authorIn 2025 International Conference On Rehabilitation Robotics (ICORR), 2025
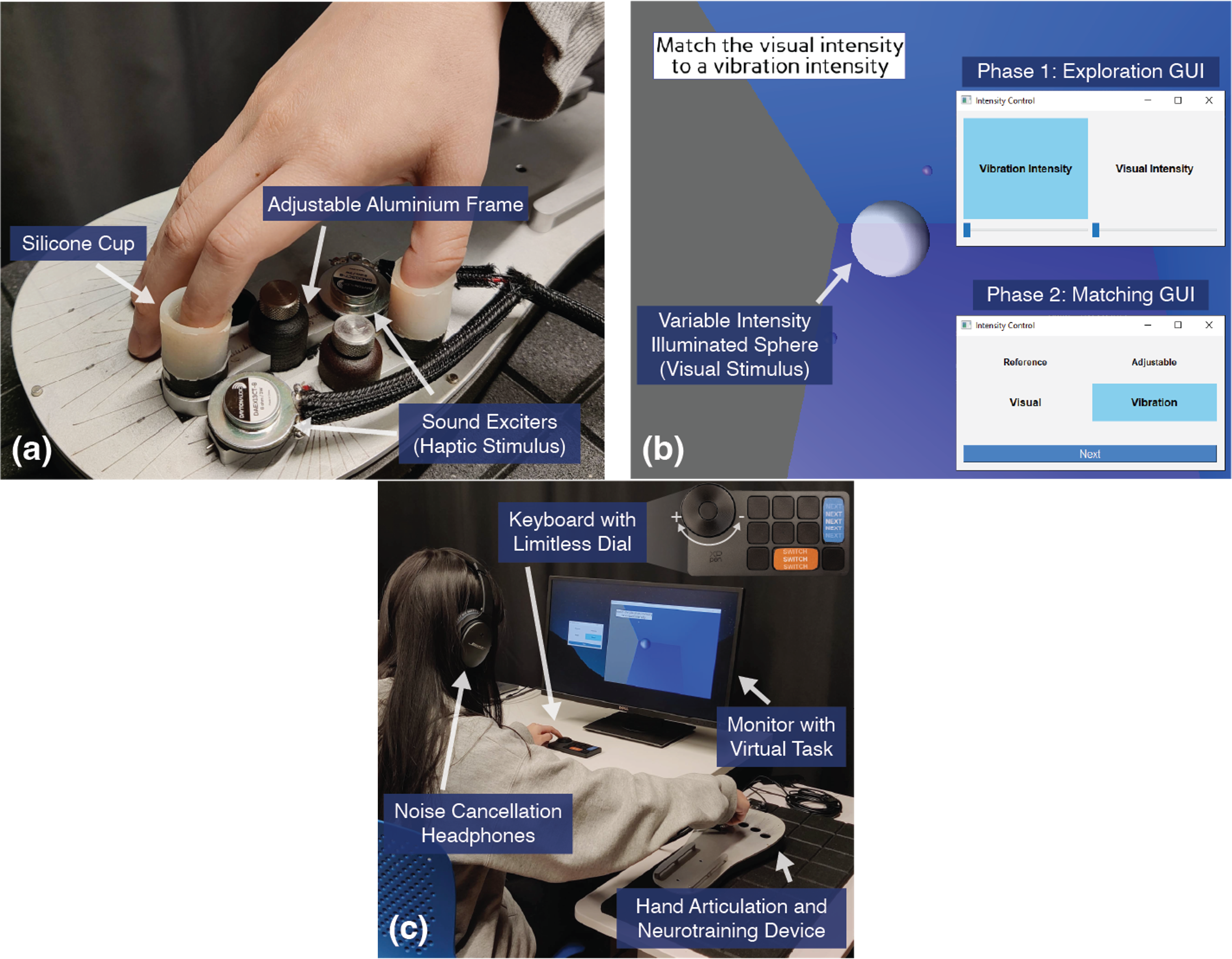
Optimizing Cross-Modal Matching for Multimodal Motor RehabilitationAnway S Pimpalkar, A Michael West, Jing Xu, and 1 more authorIn 2025 International Conference On Rehabilitation Robotics (ICORR), 2025Stroke often causes sensorimotor deficits, impairing hand dexterity and disrupting independence for millions worldwide. While rehabilitation devices leveraging visual and haptic feedback show promise, their effectiveness is limited by a lack of perceptual equity, which is necessary to ensure fair comparisons between sensory modalities. This study refines cross-modal matching protocols to address this gap, enabling unbiased evaluation of multimodal feedback. Using the Hand Articulation and Neurotraining Device (HAND), 12 healthy participants matched visual and haptic stimuli in a structured task. A streamlined protocol, requiring just 2−3 blocks and 3 reference intensities, reduced experimental time fivefold while preserving data integrity. Data were analyzed using linear and exponential models applied to both full and reduced datasets. The results demonstrated consistent participant performance across trials, with higher matching errors at greater stimulus intensities, likely attributable to sensory saturation effects. Furthermore, the study offered practical methodological insights, including the use of reduced data sampling paradigms to enhance experimental efficiency significantly while preserving data integrity. This work advances perceptual equity in multisensory feedback systems, addressing sensory encoding variability to support scalable, personalized therapeutic strategies for stroke recovery.
@inproceedings{pimpalkar2025optimizing, title = {Optimizing Cross-Modal Matching for Multimodal Motor Rehabilitation}, author = {Pimpalkar, Anway S and West, A Michael and Xu, Jing and Brown, Jeremy D}, booktitle = {2025 International Conference On Rehabilitation Robotics (ICORR)}, pages = {559--566}, year = {2025}, organization = {IEEE}, doi = {10.1109/ICORR66766.2025.11063112}, } -
 A Geometric Approach for the Comparison of Kinematic Synergy PosturesFederico Tessari, A Michael West, and Neville HoganIn 2025 International Conference On Rehabilitation Robotics (ICORR), 2025
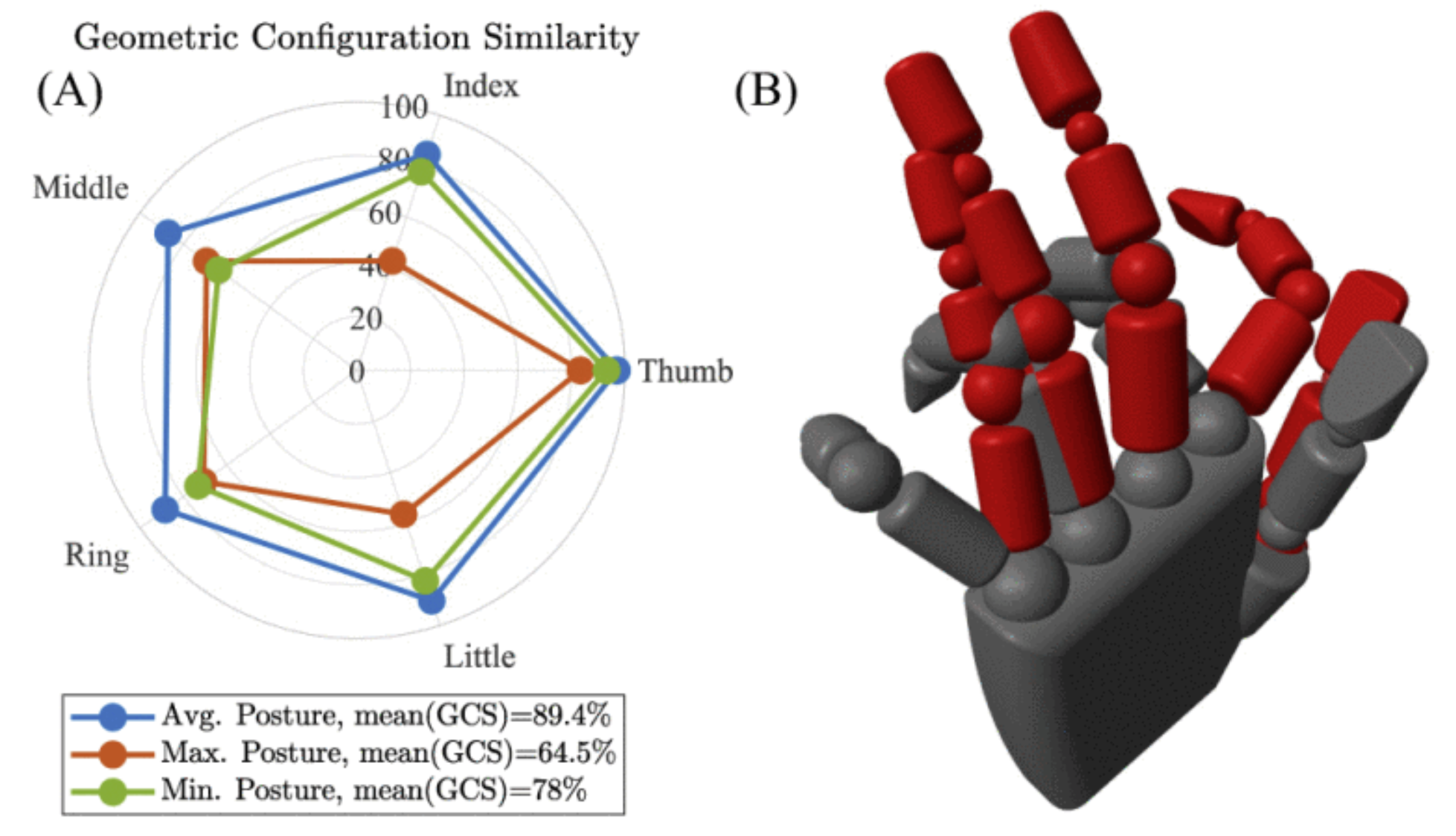
A Geometric Approach for the Comparison of Kinematic Synergy PosturesFederico Tessari, A Michael West, and Neville HoganIn 2025 International Conference On Rehabilitation Robotics (ICORR), 2025The analysis of human movements has highlighted the presence of stereotyped coordination patterns among the different joints of the human body. These patterns are commonly referred to as kinematic synergies. Synergies have been used to both elucidate the underlying neuromotor control strategies adopted by humans during coordinated motion and inform the design and control of assistive and rehabilitative devices such as prostheses and exoskeletons. A particularly thorny problem in the analysis of synergies is the comparison of the synergy postures i.e., the hyper-dimensional vectors containing the contribution of each analyzed feature (e.g., joint angles) to the considered synergies. Often, synergy postures are compared using cosine similarity, which is sensitive to the dimensionality of the input data and does not offer an intuitive understanding of the synergies’ similarities and differences. In this study, we introduce a new geometric method, Geometric Configuration Similarity (GCS), specifically designed to compare kinematic synergy postures, with a particular emphasis on hand kinematic synergies. GCS provides a more intuitive geometric understanding of how these postures relate to one another. We demonstrate its advantages over cosine similarity through experimental and numerical results, offering the human motor control and rehabilitation robotics communities a new tool for analyzing kinematic hand synergies and improving the design and control of assistive systems.
@inproceedings{tessari2025geometric, title = {A Geometric Approach for the Comparison of Kinematic Synergy Postures}, author = {Tessari, Federico and West, A Michael and Hogan, Neville}, booktitle = {2025 International Conference On Rehabilitation Robotics (ICORR)}, pages = {36--43}, year = {2025}, organization = {IEEE}, doi = {10.1109/ICORR66766.2025.11063213}, } -
 The Study of Dexterous Hand Manipulation: A Synergy-Based Complexity IndexA Michael West, Federico Tessari, Margaret Wang, and 1 more authorIEEE Transactions on Medical Robotics and Bionics, 2025
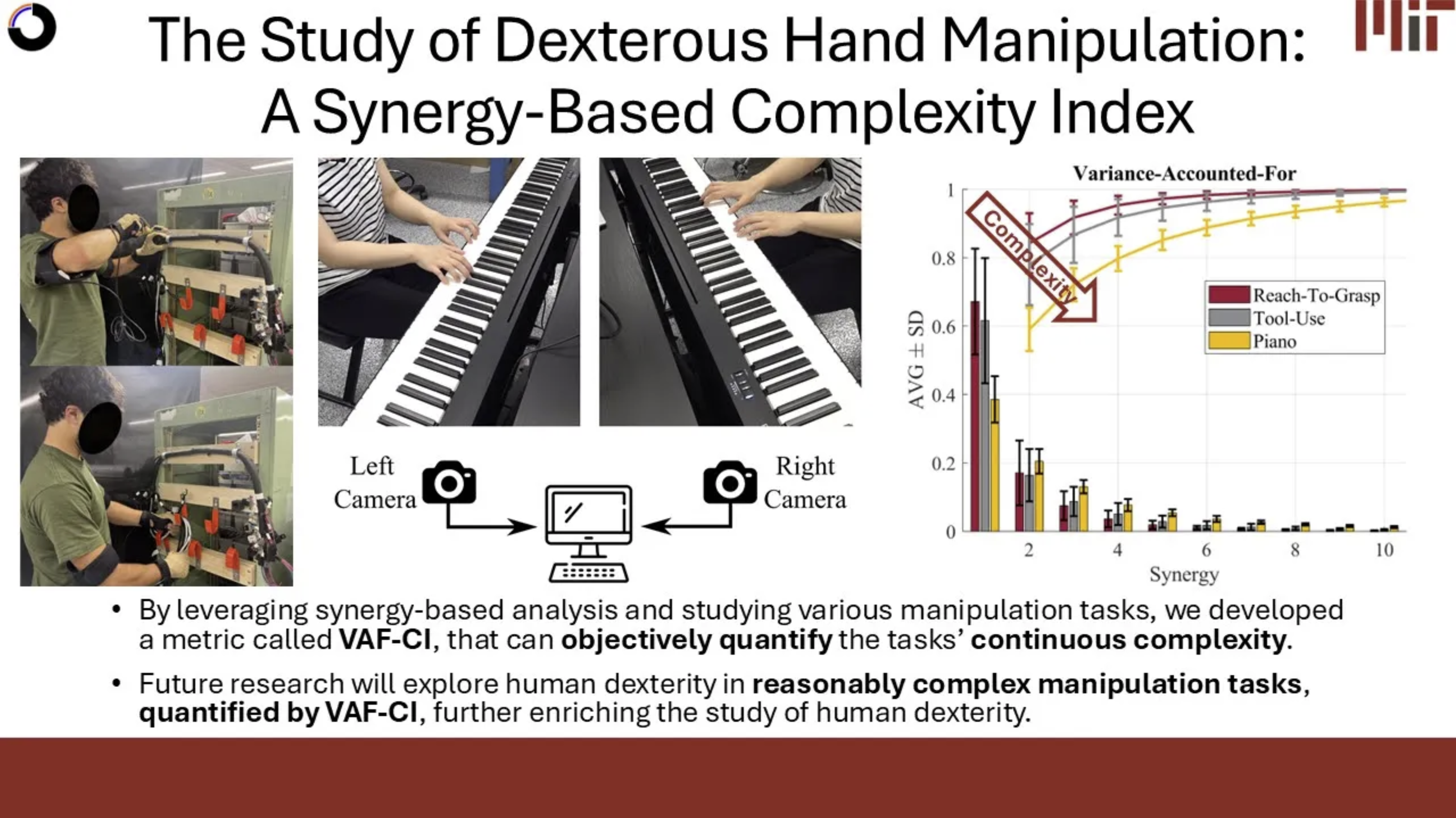
The Study of Dexterous Hand Manipulation: A Synergy-Based Complexity IndexA Michael West, Federico Tessari, Margaret Wang, and 1 more authorIEEE Transactions on Medical Robotics and Bionics, 2025In this work we tackle the question of how to analyze and objectively quantify the complexity of a manipulation task. The study investigates the kinematic behavior of the hand joints in three different manipulation tasks of growing complexity: reaching-to-grasp, tool use and piano playing. The collected data were processed to extract the kinematic synergies of the hand by means of singular value decomposition. A novel, unbiased metric to determine hand manipulation complexity was based on the cumulative variance accounted for. This Variance-Accounted-For Complexity Index (VAF-CI) reliably distinguished between different manipulation tasks. Moreover, an unsupervised learning method (k-means clustering) was able to use the index to accurately identify the 3 distinct manipulation tasks. These results may be leveraged to improve the control of biomimetic dexterous robots during manipulation tasks.
@article{west2025VAFCI, title = {The Study of Dexterous Hand Manipulation: A Synergy-Based Complexity Index}, author = {West, A Michael and Tessari, Federico and Wang, Margaret and Hogan, Neville}, journal = {IEEE Transactions on Medical Robotics and Bionics}, year = {2025}, publisher = {IEEE}, doi = {10.1109/TMRB.2025.3531006}, videosummary = {https://youtu.be/nPK-rqbUegc?si=AhA4DzJYsaKrgaMN} } -
 Explaining human motor coordination via the synergy expansion hypothesisFederico Tessari, A Michael West Jr, and Neville HoganProceedings of the National Academy of Sciences, 2025
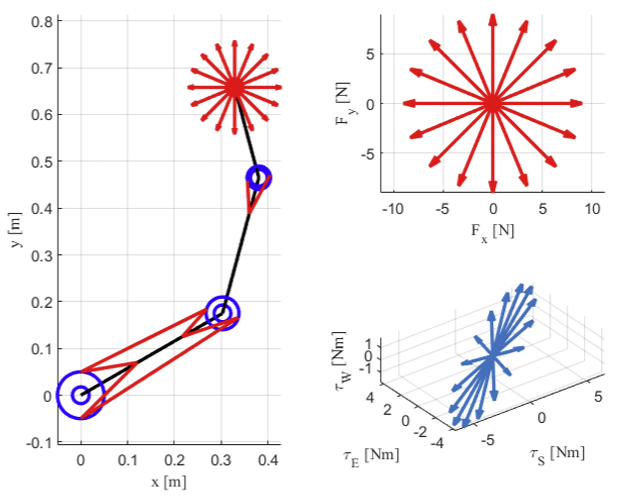
Explaining human motor coordination via the synergy expansion hypothesisFederico Tessari, A Michael West Jr, and Neville HoganProceedings of the National Academy of Sciences, 2025The search for an answer to Bernstein’s degrees of freedom problem has propelled a large portion of research studies in human motor control over the past six decades. Different theories have been developed to explain how humans might use their incredibly complex neuro-musculo-skeletal system with astonishing ease. Among these theories, motor synergies appeared as one possible explanation. In this work, the authors investigate the nature and role of synergies and propose a theoretical framework, namely the “expansion hypothesis,” to answer Bernstein’s problem. The expansion hypothesis is articulated in three propositions: mechanical, developmental, and behavioral. Each proposition addresses a different question on the nature of synergies: i) How many synergies can humans have? ii) How do we learn and develop synergies? iii) How do we use synergies? An example numerical simulation is presented and analyzed to clarify the hypothesis propositions. The expansion hypothesis is contextualized with respect to the existing literature on motor synergies both in healthy and impaired individuals, as well as other prominent theories in human motor control and development. The expansion hypothesis provides a framework to better comprehend and explain the nature, use, and evolution of human motor skills.
@article{tessari2025explaining, title = {Explaining human motor coordination via the synergy expansion hypothesis}, author = {Tessari, Federico and West Jr, A Michael and Hogan, Neville}, journal = {Proceedings of the National Academy of Sciences}, volume = {122}, number = {13}, pages = {e2501705122}, year = {2025}, publisher = {National Academy of Sciences}, doi = {10.1073/pnas.2501705122}, videosummary = {https://youtu.be/pwheVM0sfGQ?si=1UceqhIbX0ZOQED7} } -
 Kinematic hand synergies differ between reach-and-grasp and functional object manipulationA Michael West Jr, and Neville HoganJournal of Neurophysiology, 2025
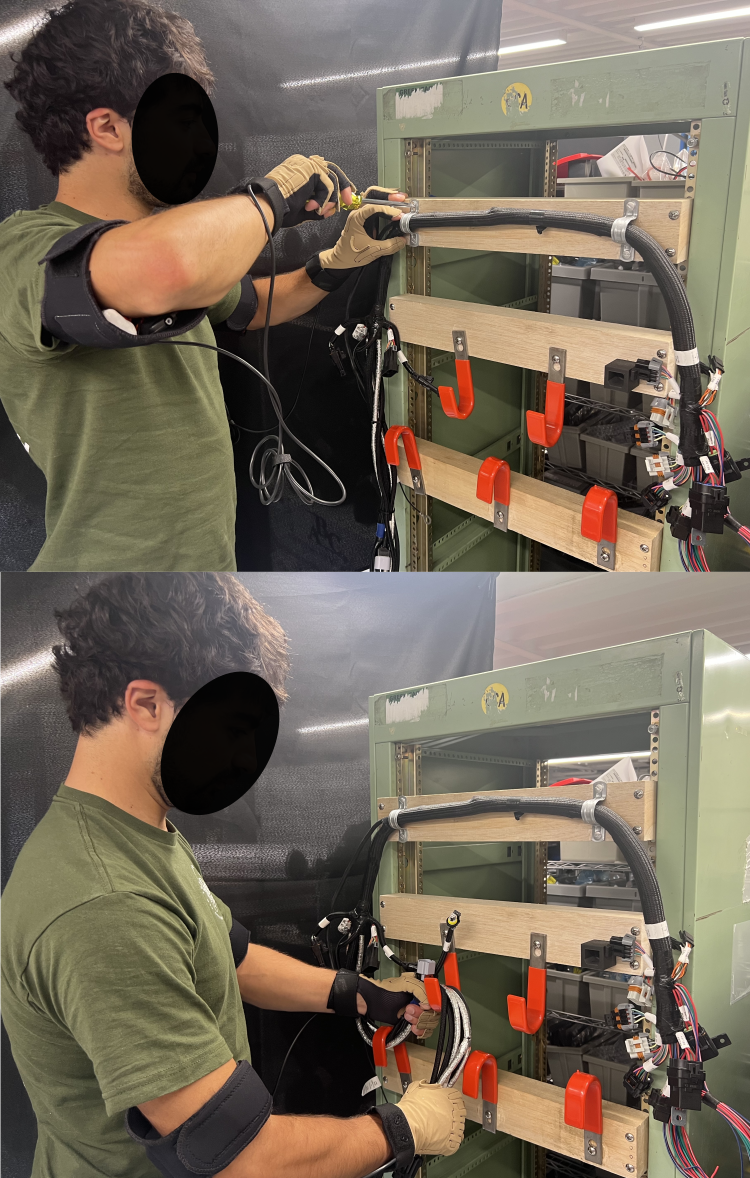
Kinematic hand synergies differ between reach-and-grasp and functional object manipulationA Michael West Jr, and Neville HoganJournal of Neurophysiology, 2025Humans possess a unique ability to manipulate tools to help us navigate the world around us. This ability is facilitated by the dexterity of our hands. However, millions lose this capability annually due to conditions like limb amputation or cerebral vascular accident (i.e., stroke). This great loss of human hand function has led to increased study of human hand action. Although previous research focused on coordinated hand motion, known as synergies, during reaching and grasping, manipulation of complex objects remains understudied. Specifically, we aimed to test two hypotheses: 1) the number of synergies underlying manipulation is the same as those underlying reach-and-grasp, and 2) the identity of synergies underlying manipulation is different from those underlying reach-and-grasp. To do so, we measured human hand motion during two experiments: 1) during reach and grasp of a tool or object commonly used in wire harness installation and 2) during manipulation of those objects and tools to install a wire harness on a mock electrical cabinet. Results showed that manipulation generally required more synergies than grasp. Comparison between reach-and-grasp and manipulation revealed a decrease in synergy similarity with synergy-order. Considering that higher-order synergies become significant during manipulation, it is important that we investigate these differences; this study serves as a point of entry to doing so. If we want our prosthetic and rehabilitative devices to restore hand function to those who have lost it, we must study hand function, specifically manipulation, and not just grasping.
@article{west2025WireHarnessSynergies, title = {Kinematic hand synergies differ between reach-and-grasp and functional object manipulation}, author = {West Jr, A Michael and Hogan, Neville}, journal = {Journal of Neurophysiology}, volume = {133}, number = {2}, pages = {547--560}, year = {2025}, publisher = {American Physiological Society Rockville, MD}, doi = {10.1152/jn.00101.2024}, videosummary = {https://youtu.be/P-LnOWyzrh4?si=F1q4COBxnv67VUzQ} }
2024
-
 Divide et Impera: Learning impedance families for peg-in-hole assemblyarXiv e-prints, 2024
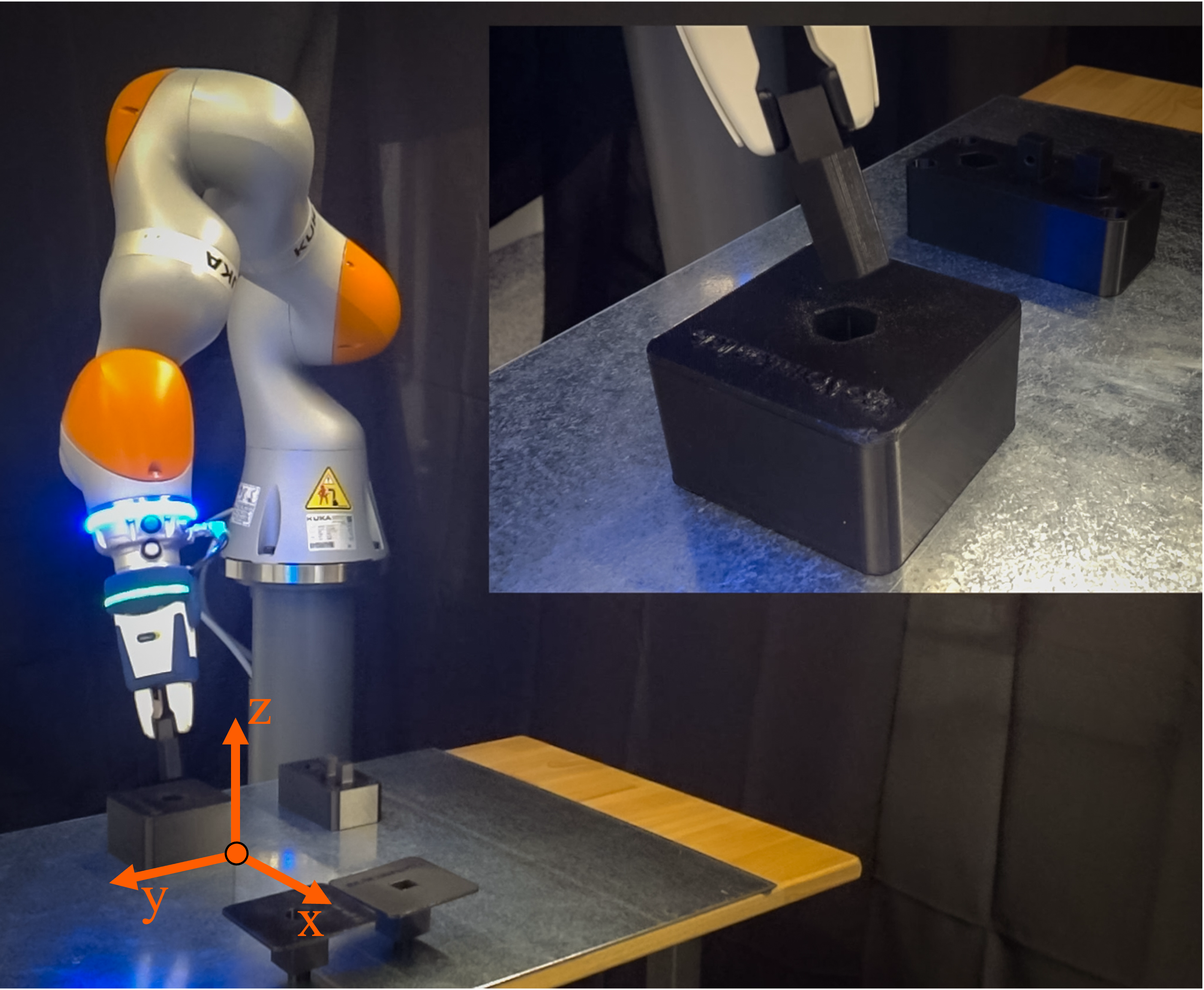
Divide et Impera: Learning impedance families for peg-in-hole assemblyarXiv e-prints, 2024This paper addresses robotic peg-in-hole assembly using the framework of Elementary Dynamic Actions (EDA). Inspired by motor primitives in neuromotor control research, the method leverages three primitives: submovements, oscillations, and mechanical impedances (e.g., stiffness and damping), combined via a Norton equivalent network model. By focusing on impedance parameterization, we explore the adaptability of EDA in contact-rich tasks. Experimental results, conducted on a real robot setup with four different peg types, demonstrated a range of successful impedance parameters, challenging conventional methods that seek optimal parameters. We analyze our data in a lower-dimensional solution space. Clustering analysis shows the possibility to identify different individual strategies for each single peg, as well as common strategies across all pegs. A neural network model, trained on the experimental data, accurately predicted successful impedance parameters across all pegs. The practical utility of this work is enhanced by a success-predictor model and the public availability of all code and CAD files. These findings highlight the flexibility and robustness of EDA; show multiple equally-successful strategies for contact-rich manipulation; and offer valuable insights and tools for robotic assembly programming.
@article{lachner2024divide, title = {Divide et Impera: Learning impedance families for peg-in-hole assembly}, author = {Lachner, Johannes and Tessari, Federico and West Jr, A Michael and Nah, Moses C and Hogan, Neville}, journal = {arXiv e-prints}, pages = {arXiv--2410}, year = {2024}, } -
 All Models are Wrong, Simple Models Provide Insight: A Study of Human ManipulationA Michael West JrMassachusetts Institute of Technology, 2024
All Models are Wrong, Simple Models Provide Insight: A Study of Human ManipulationA Michael West JrMassachusetts Institute of Technology, 2024Humans possess a unique ability to manipulate tools, facilitated by the dexterity of our hands. Unfortunately, millions lose this capability annually due to conditions like limb amputation or Cerebral Vascular Accident. Robotic rehabilitation technologies, including prosthetics and exoskeletons, aim to restore motor function. However, understanding human control strategies is crucial for effective implementation. Unfortunately, studying humans is challenging due to their inherent complexity. Simple models can help untangle this complexity. This thesis delves into the role of simple models in analyzing human neural motor control and perception through the study of upper-limb motor control and hand manipulation. Specifically, this thesis aims to develop a descriptive understanding of human manipulation in unimpaired subjects. To achieve this, we first delve into a common simplification of human hand manipulation—the presence of kinematic hand synergies—and stress the importance of studying functional hand manipulation beyond simple grasping. Secondly, we present findings from a motor control study that introduces a simple mathematical model, emphasizing mechanical impedance, that competently describes how humans manage physical interaction. Thirdly, we underscore the significance of mechanical impedance through a perceptual study which highlighted humans’ robust ability to perceive limb stiffness. Lastly, we introduce a metric that can objectively quantifying manipulation complexity, potentially broadening researchers’ scope in studying human complex manipulation. The insights gained from this work have far-reaching implications, potentially enhancing existing robotic and rehabilitation technologies and guiding the development of new ones. In a field dominated by large complex models fed by big data, this thesis highlights the value of conducting the basic science research required to uncover aspects of human motor control.
@phdthesis{west2024all, title = {All Models are Wrong, Simple Models Provide Insight: A Study of Human Manipulation}, author = {West Jr, A Michael}, year = {2024}, school = {Massachusetts Institute of Technology}, videosummary = {https://youtu.be/u2eCJHqEGww?si=WoOox8dL5UDaeRMl} } - On Human Motor Coordination: The Synergy Expansion HypothesisFederico Tessari, A. Michael West Jr., and Neville HoganbioRxiv, 2024
The search for an answer to Bernstein’s degrees of freedom problem has propelled a large portion of research studies in human motor control over the past six decades. Different theories have been developed to explain how humans might use their incredibly complex neuro-musculo-skeletal system with astonishing ease. Among these theories, motor synergies appeared as one possible explanation. In this work, the authors investigate the nature and role of synergies and propose a new theoretical framework, namely the “expansion hypothesis”, to answer Bernstein’s problem. The expansion hypothesis is articulated in three propositions: mechanical, developmental, and behavioral. Each proposition addresses a different question on the nature of synergies: (i) How many synergies can humans have? (ii) How do we learn and develop synergies? (iii) How do we use synergies? An example numerical simulation is presented and analyzed to clarify the hypothesis propositions. The expansion hypothesis is contextualized with respect to the existing literature on motor synergies both in healthy and impaired individuals, as well as other prominent theories in human motor control and development. The expansion hypothesis provides a novel framework to better comprehend and explain the nature, use and evolution of human motor skills.
@article{Tessari2024, title = {On Human Motor Coordination: The Synergy Expansion Hypothesis}, author = {Tessari, Federico and West Jr., A. Michael and Hogan, Neville}, journal = {bioRxiv}, year = {2024}, publisher = {Cold Spring Harbor Laboratory}, }
2023
-
 The Study of Complex Manipulation via Kinematic Hand Synergies: The Effects of Data Pre-ProcessingA. Michael West Jr., Federico Tessari, and Neville HoganIEEE ... International Conference on Rehabilitation Robotics : [proceedings], Sep 2023
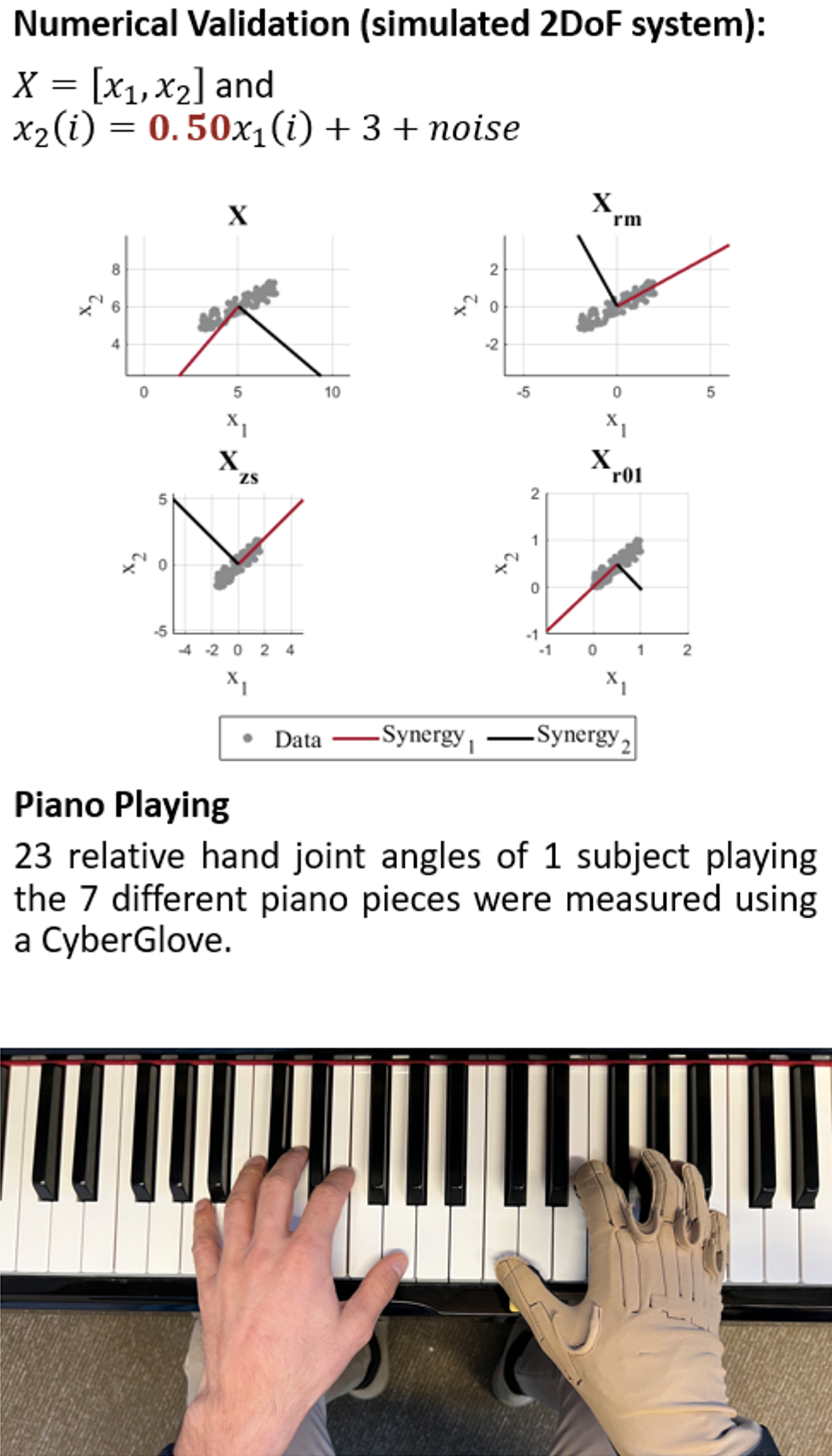
The Study of Complex Manipulation via Kinematic Hand Synergies: The Effects of Data Pre-ProcessingA. Michael West Jr., Federico Tessari, and Neville HoganIEEE ... International Conference on Rehabilitation Robotics : [proceedings], Sep 2023The study of kinematic hand synergies through matrix decomposition techniques, such as singular value decomposition, supports the theory that humans might control a subspace of predefined motions during manipulation tasks. These subspaces are often referred to as synergies. However, different data pre-processing methods lead to quantitatively different conclusions about these synergies. In this work, we shed light on the role of data pre-processing on the study of hand synergies by analyzing both numerical simulation and real kinematic data from a complex manipulation task, i.e., piano playing. The results obtained suggest that centering the data, by removing the mean, appears to be the most appropriate preprocessing technique for studying kinematic hand synergies.
@article{West2023, author = {West Jr., A. Michael and Tessari, Federico and Hogan, Neville}, doi = {10.1109/ICORR58425.2023.10304710}, issn = {19457901}, journal = {IEEE ... International Conference on Rehabilitation Robotics : [proceedings]}, keywords = {Human Hand, Manipulation, Rehabilitation, Singular Value Decomposition, Synergy, Task Complexity}, month = sep, pages = {1--6}, pmid = {37941248}, title = {{The Study of Complex Manipulation via Kinematic Hand Synergies: The Effects of Data Pre-Processing}}, volume = {2023}, year = {2023}, videosummary = {https://www.youtube.com/watch?v=J1Xp5Ekl6JQ} }
2022
-
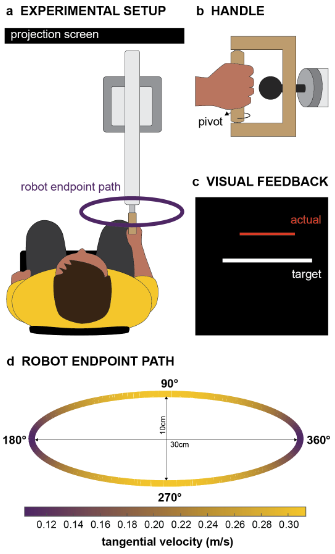 Dynamic Primitives Limit Human Force Regulation During MotionIEEE Robotics and Automation Letters, Apr 2022
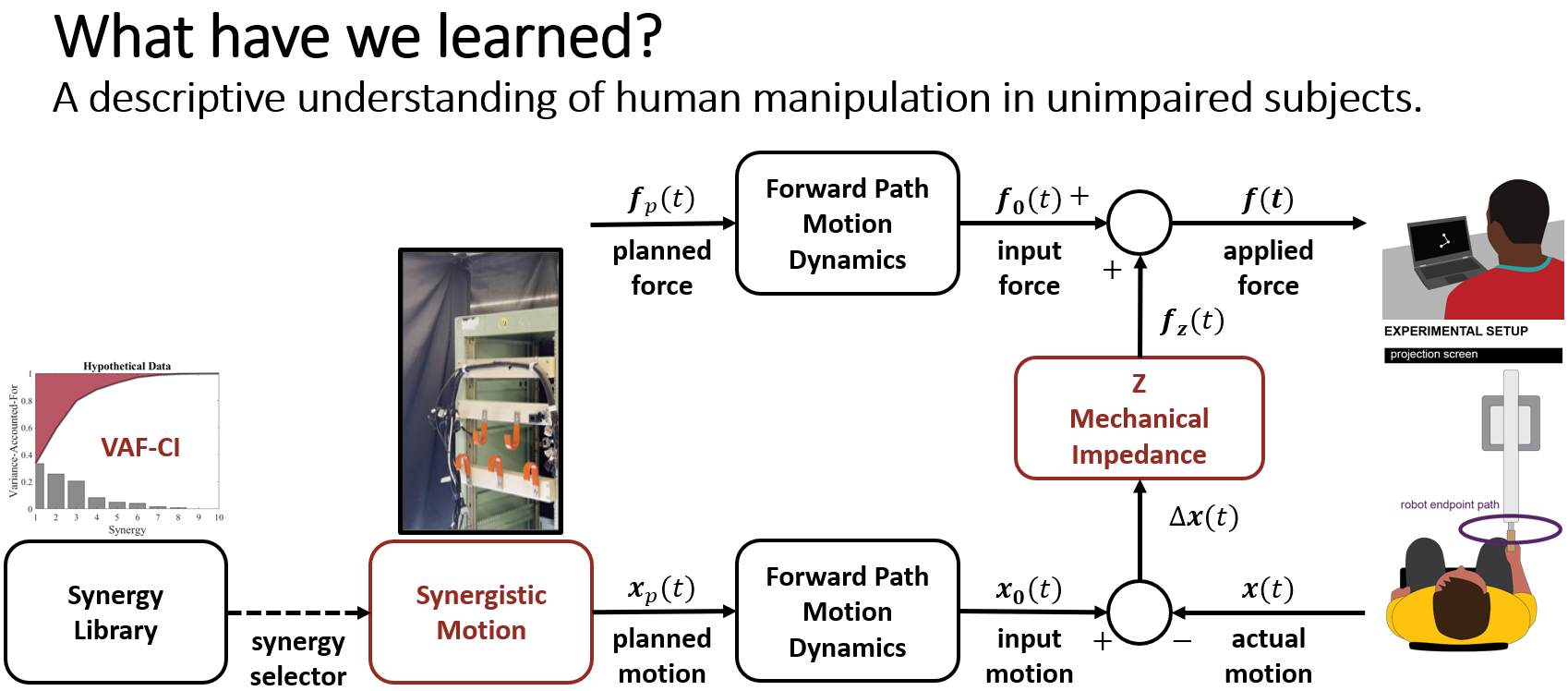
Dynamic Primitives Limit Human Force Regulation During MotionIEEE Robotics and Automation Letters, Apr 2022Humans excel at physical interaction despite long feedback delays and low-bandwidth actuators. Yet little is known about how humans manage physical interaction. A quantitative understanding of how they do is critical for designing machines that can safely and effectively interact with humans, e.g. amputation prostheses, assistive exoskeletons, therapeutic rehabilitation robots, and physical human-robot collaboration. To facilitate applications, this understanding should be in the form of a simple mathematical model that not only describes humans’ capabilities but also their limitations. In robotics, hybrid control allows simultaneous, independent control of both motion and force and it is often assumed that humans can modulate force independent of motion as well. This letter experimentally tested that assumption. Participants were asked to apply a constant 5 N force on a robot manipulandum that moved along an elliptical path. After initial improvement, force errors quickly plateaued, despite practice and visual feedback. Within-trial analyses revealed that force errors varied with position on the ellipse, rejecting the hypothesis that humans have independent control of force and motion. The findings are consistent with a feed-forward motion command composed of two primitive oscillations acting through mechanical impedance to evoke force.
@article{West2022, author = {West Jr., A. Michael and Hermus, James and Huber, Meghan E. and Maurice, Pauline and Sternad, Dagmar and Hogan, Neville}, journal = {IEEE Robotics and Automation Letters}, month = apr, number = {2}, pages = {2391--2398}, publisher = {Institute of Electrical and Electronics Engineers Inc.}, title = {{Dynamic Primitives Limit Human Force Regulation During Motion}}, doi = {10.1109/LRA.2022.3141778}, volume = {7}, year = {2022}, videosummary = {https://www.youtube.com/watch?v=RRfWe9KVSDY} } -
 Role of path information in visual perception of joint stiffnessA. Michael West Jr., Meghan E. Huber, and Neville HoganPLoS Computational Biology, Nov 2022
Role of path information in visual perception of joint stiffnessA. Michael West Jr., Meghan E. Huber, and Neville HoganPLoS Computational Biology, Nov 2022Humans have an astonishing ability to extract hidden information from the movement of others. In previous work, subjects observed the motion of a simulated stick-figure, two-link planar arm and estimated its stiffness. Fundamentally, stiffness is the relation between force and displacement. Given that subjects were unable to physically interact with the simulated arm, they were forced to make their estimates solely based on observed kinematic information. Remarkably, subjects were able to correctly correlate their stiffness estimates with changes in the simulated stiffness, despite the lack of force information. We hypothesized that subjects were only able to do this because the controller used to produce the simulated arm’s movement, composed of oscillatory motions driving mechanical impedances, resembled the controller humans use to produce their own movement. However, it is still unknown what motion features subjects used to estimate stiffness. Human motion exhibits systematic velocity-curvature patterns, and it has previously been shown that these patterns play an important role in perceiving and interpreting motion. Thus, we hypothesized that manipulating the velocity profile should affect subjects’ ability to estimate stiffness. To test this, we changed the velocity profile of the simulated two-link planar arm while keeping the simulated joint paths the same. Even with manipulated velocity signals, subjects were still able to estimate changes in simulated joint stiffness. However, when subjects were shown the same simulated path with different velocity profiles, they perceived motions that followed a veridical velocity profile to be less stiff than that of a non-veridical profile. These results suggest that path information (displacement) predominates over temporal information (velocity) when humans use visual observation to estimate stiffness.
@article{West2024, author = {West Jr., A. Michael and Huber, Meghan E. and Hogan, Neville}, journal = {PLoS Computational Biology}, month = nov, number = {11}, pages = {e1010729}, publisher = {Public Library of Science}, title = {{Role of path information in visual perception of joint stiffness}}, doi = {10.1371/journal.pcbi.1010729}, volume = {18}, year = {2022}, videosummary = {https://www.youtube.com/watch?v=-bbXeqru7b0} }