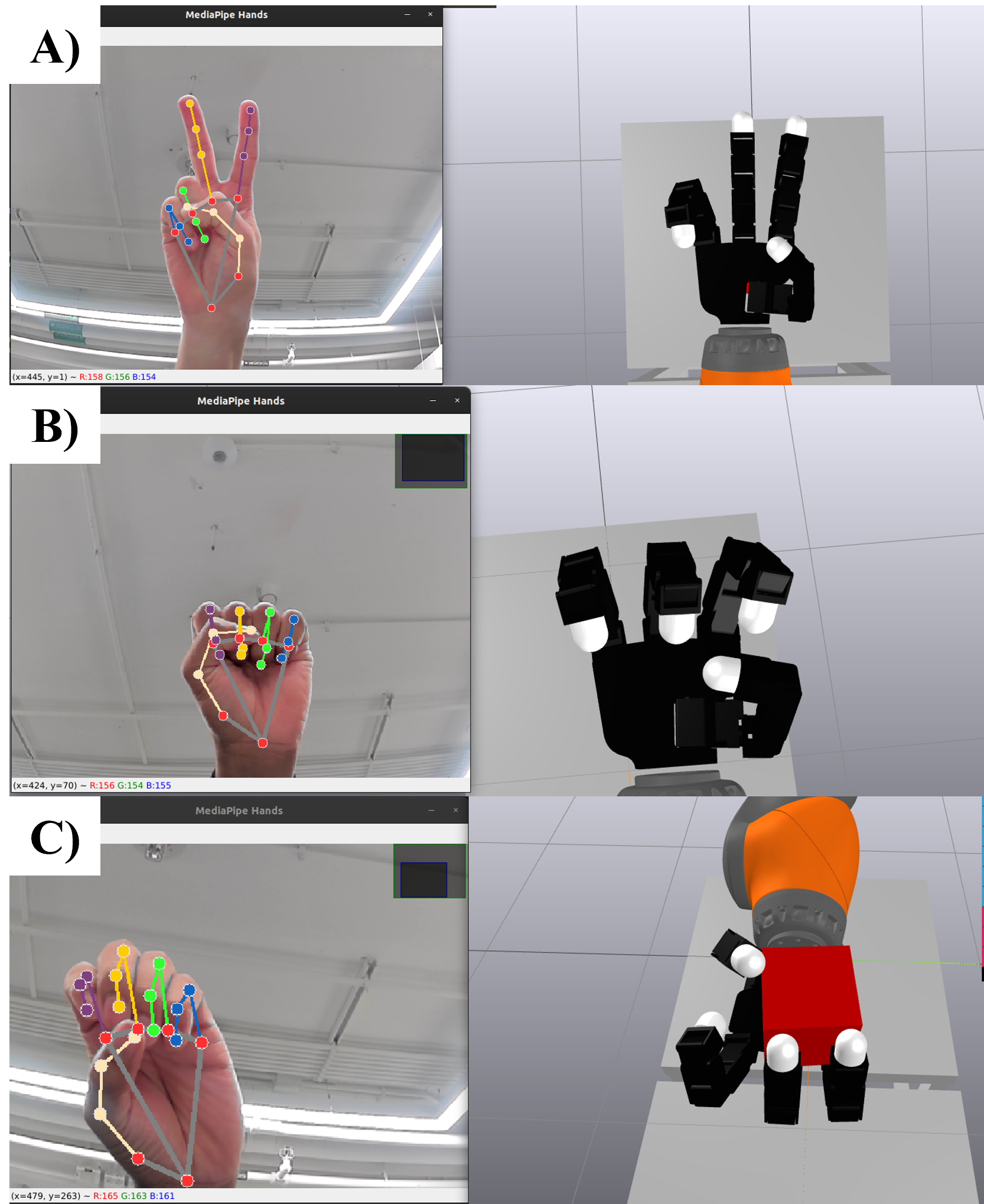
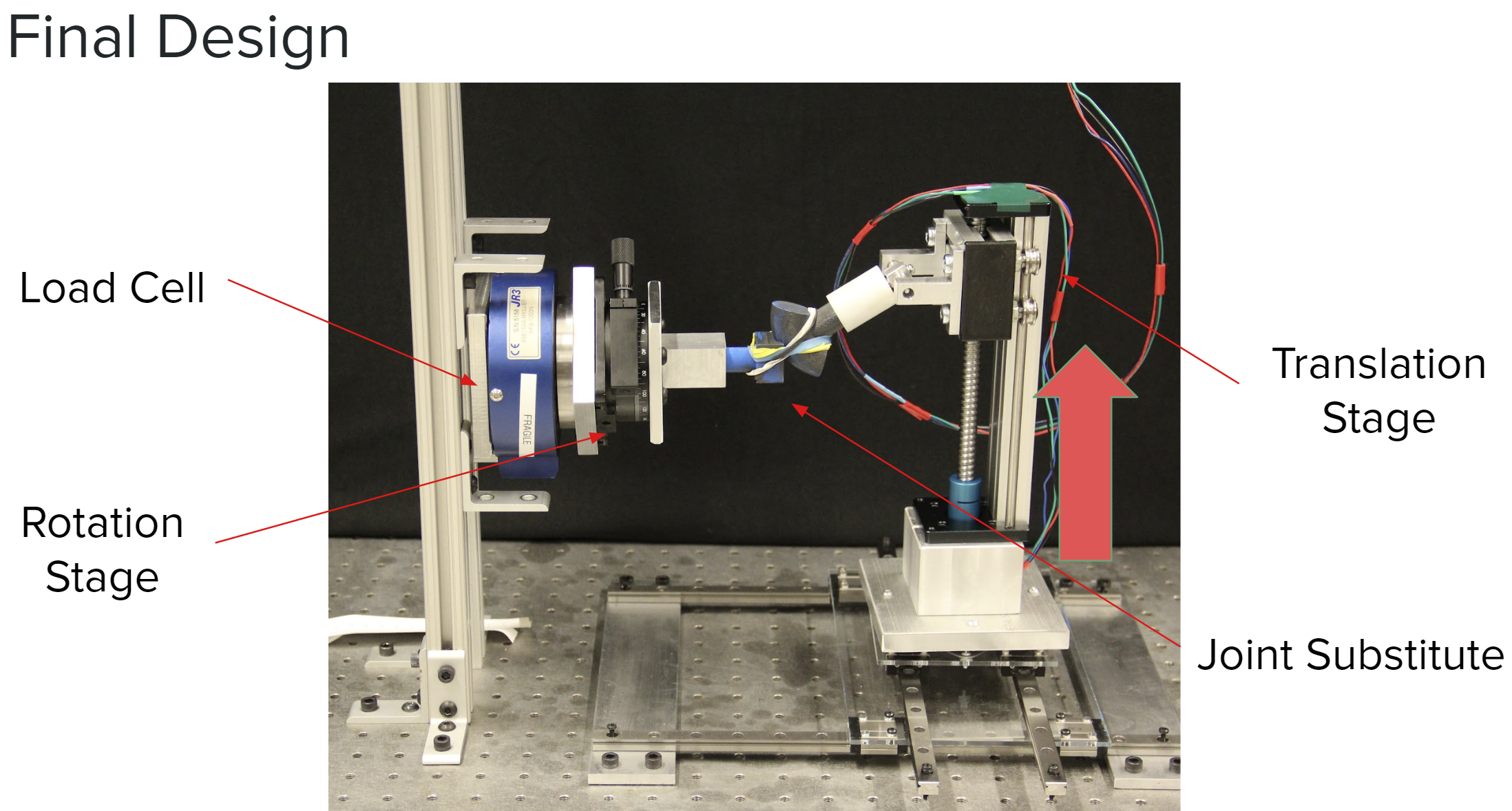
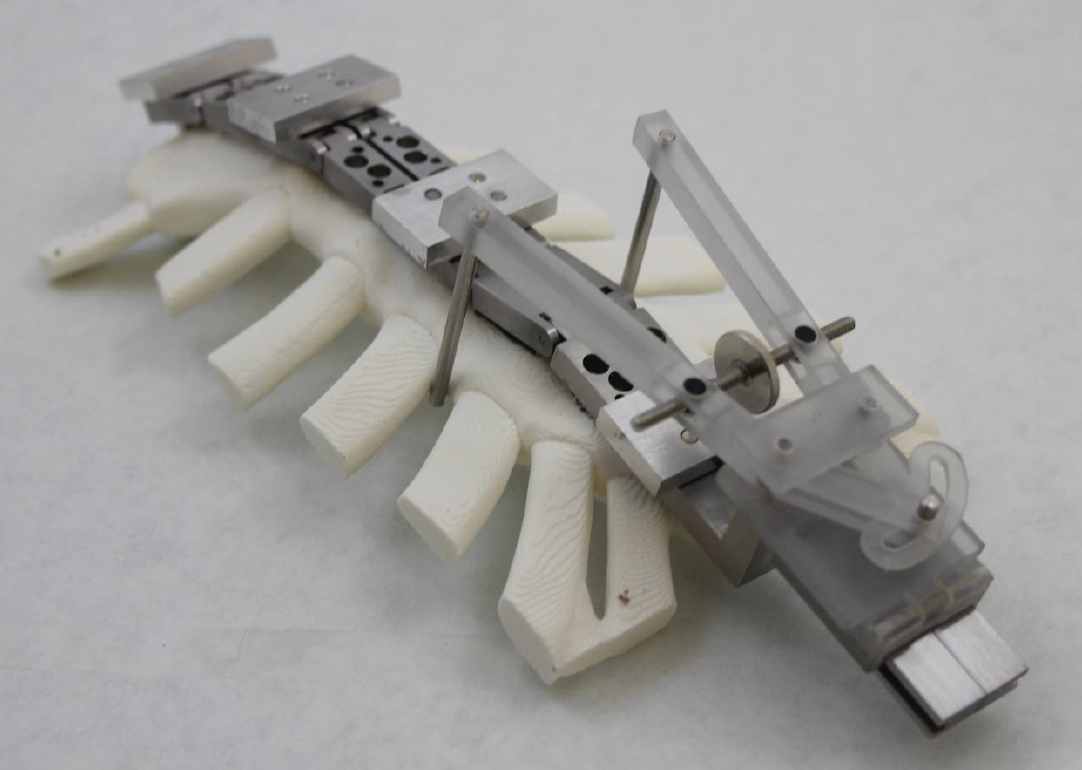
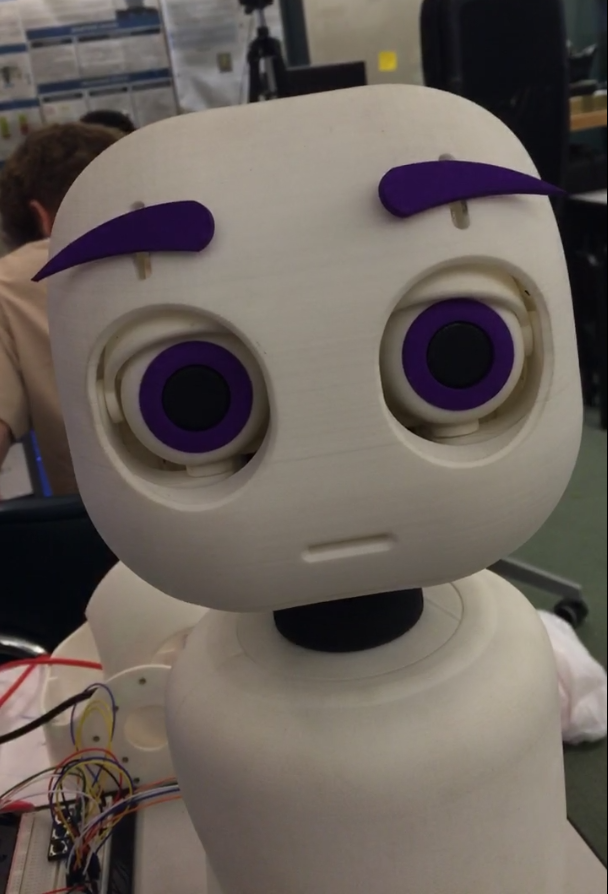
Graduate Projects Allegro Hand Teleop in PyDrake 6.4212 Robotic Manipulation course project Undergraduate Projects To Move or Not to Move: Principal Curvatures of Articular Surfaces A Novel Sternotomy Saw Guide Incorporating Integrated Rigid Fixation Adding articulating eyebrows to the Maki Robot